1 – Actuator
Following the results of the experiments in London in december and the characterization and modeling of the actuator, a paper was written and submitted to the IROS 2015 conference. First designs have also been made, together with Caspar Gruijthuijsen, for a 3mm version of the actuator. It is now being manufactured and tested.
2 – Tracking in the OR
Some parts of the recording equipment were redesigned in order to make the recordings easier :
– Incision sensor was placed in a ring connector that fits to the trocar. It is then fixed and its center is the incision site. The connector was designed by Manu Vander Poorten. I developed a specific calibration procedure in order to find the transformation from the ring sensor to the incision site. It is designed to be easy and fast, in order to integrate in the clinical workflow. Experiments showed an accuracy of a few millimeters in the calibration.
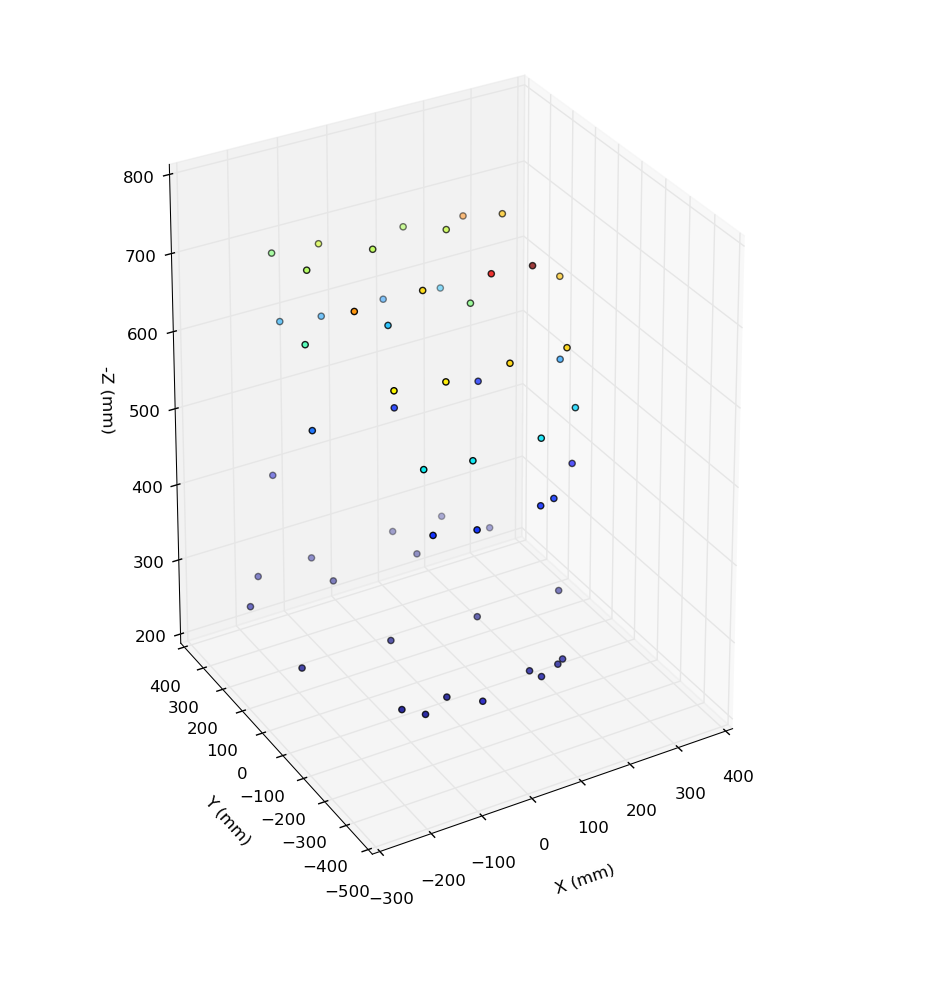
– A tabletop field generator from Aurora was ordered, which could be placed under the patient and limit the problems associated with the previous field generator. The workspace, precision and accuracy of the measurements were estimated by using a Krypton K600 metrology device available at KU Leuven as a reference. Results showed a good accuracy and precision in the tracking workspace. 3D drawings were made in order to ensure that this workspace is enough to allow recordings in the OR
– Tests were made in the operating table available in the lab, and showed good usability of the software and tracking performance. The system is now installed in the OR and measurements should start soon.
3 – Lab model for mimicking surgery
Ultrasound tests with the Surgical Touch model showed that Ultrasound imaging is very bad with this model. Several attempts have been made to rectify this, but ultimately the model had to be sent back to Canada. In order to be able to do experiments in the meanwhile, we developed an alternate solution. After checking of ultrasound compatiblity of different materials, a box was designed and manufactured. A model of placenta is also being developed. It is made to be both realistic-looking and visible in the ultrasound images. It will be used for simulating operations in the lab (and then observing/tracking movements of the operator), and for testing algorithms and devices developed.
4 – Virtual reality setup
Experiments were conducted in the virtual reality environment. An environment was designed in order to mimick the elementary steps of a TTTS procedures (follow the cord, find anastomoses, laser them, and finally perform the solomonization). Comparison of instruments virtually equipped with 1 dof or 2 dof bending at the tip was carried out, together with the ergonomical assessment of the handle interface. User tests were performed.