1 – Observations in OR
Continued observations in the OR, mostly TTTS procedures. Outside of observations conform to the previous ones, I paid special attention to possible installation of the Field generator for the Aurora EM tracking system. This is also interesting for the specs of the stabilizer arm, since it will need to be installed somewhere close to the operation site.
Regular meetings with the clinical team at Leuven.
2 – Actuator
The planned ex vivo tests in London on 9-10 december 2014 have been done in a successful way. We were able to move the probe along a line over an ex vivo human placenta and take images.
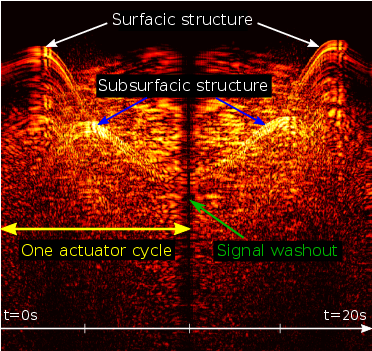
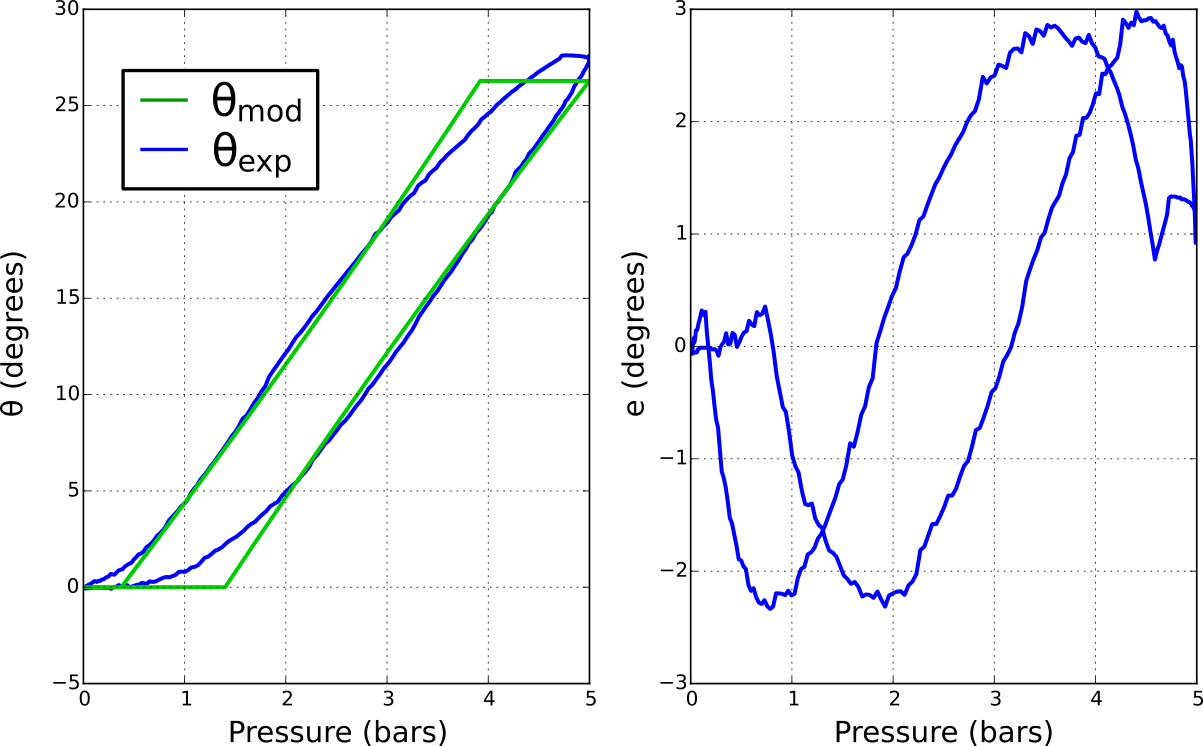
Following those experiments, the need of modelling the actual actuator trajectory based on the control input (the pressure) was identified, in order to be able to reconstruct 2D images from M-mode scans. A model of the actuator was developed. It is based on a combination of the model of the nitinol tool guide (using the Euler-Bernoulli beam theory) together with the Gaylord model of a McKibben actuator. An hysteresis model was subsequently added to account fot the hysteretic behaviour of the actuator.
Experiments have been conducted to :
– Characterize the mechanical performance of the actuator. The bandwith was evaluated to be more than 8 Hz using a high-speed camera. The repeatability was also evaluated to be very good, with an average if 0.1 degrees and standard deviation of 0.05 degrees along 4 full actuation cycles. Though the actuator exhibits a clear hysteretic behaviour, this result shows
that a specific pressure input will lead to a very repeatable movement, irrespective of the shape of the hysteresis curve.
– Characterize the composite bending stiffness of the actuator. This was done using a laser distance sensor, a force cell and a motor. By simultaneously measuring the deflection and the corresponding force one can estimate the bending stiffness. A motor was used to deflect the structure by steps of 0.1 mm, and an average bending stiffness of EI = 0.60 10−3 N.m^2 was found.
– Estimate the muscle parameters (braid angle, length at rest)
– Characterize the actual response of the actuator vs the predicted one from the model. This was done using an Aurora EMT sensor. The modelling error e is on average −0.28 degrees, with a standard deviation of 1.39 degrees and a maximum of 1.79 degrees. While this is not enough to allow reconstruction of images from the PA/US sensor, it is a promising result that could be combined with visual tracking and closed loop control for better accuracy.
3 – OR tracking
Development of robust software for managing the EM tracking in the OR. I paid special attention to usability, making an FSM to ensure that mismanipulation of the interface could not lead to corrupted results.
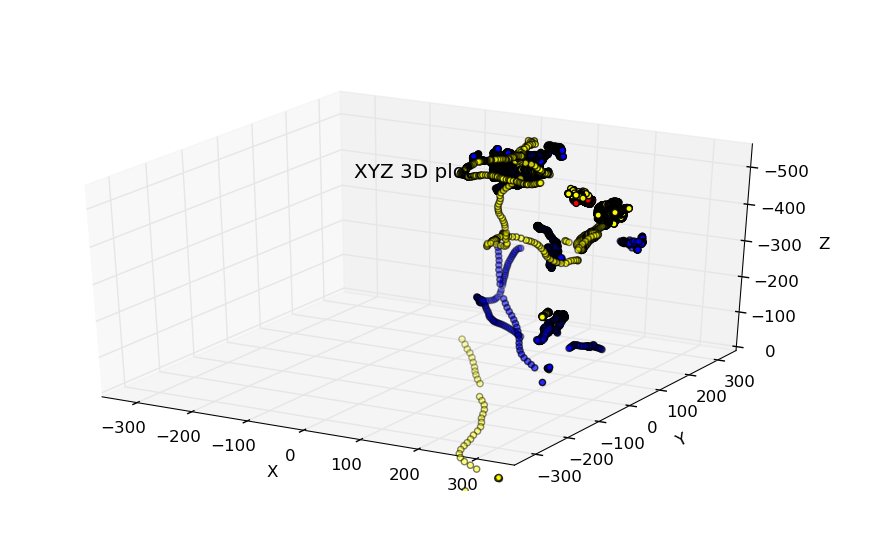
Tests have been conducted on a realistic model of a fetus in the uterus of his mother (Surgical Touch, Canada) and showed a good usability. Tests have been carried out with Alexander Engels for the positioning of the Aurora field generator. Following reception of the ethical approval, a first test was conducted in the OR on a patient. Though succesful tracking was achieved, this highlighted several limitations :
– positioning of the field generator is limiting some motions of the assistant and the surgeon. As a result, it was positioned too far from the incision site and some critical parts of the operation could not be recorded because the scope sensor was out of volume
– incision sensor is also slipping on the patient
This experiment showed that tracking of the movements in the OR is feasible, but that some iteration on the design of the experiment is needed.