We realized several calibration experiments using a straight fetoscope (GRIN Lens) for simplicity purposes. We considered camera models commonly assumed in computer vision and more particularly the general model of central catadioptric camera (figure 1). We chose this latter one because it was originally designed for wide field of view optical system.
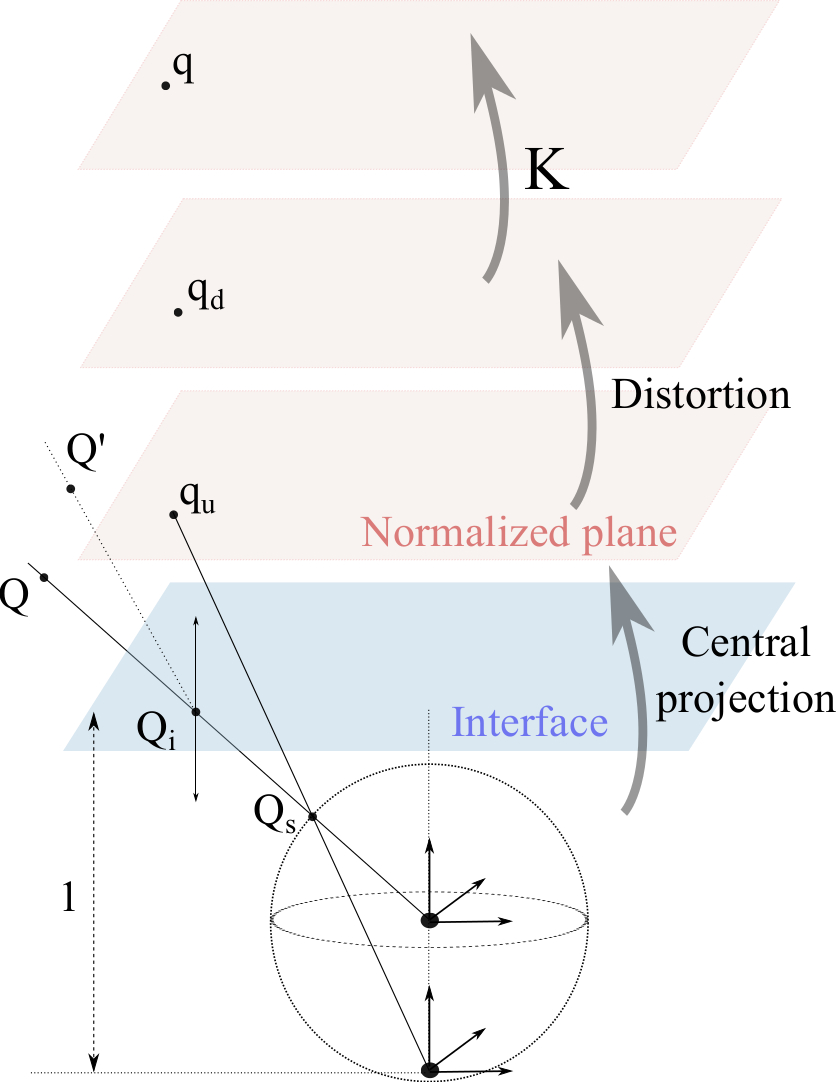
fig1: general model of central catadioptric system
This experiments showed that a direct link could be established between dry and immerged calibration without estimating a new distortion function (by changing the focal length and projection enters). However, it is difficult to establish a proper mathematical link and it was necessary to use an underwater image to fully calibrate the system.
François Chadebecq, February 2015: Activity report