Insert a Title Here Outlining Your Entry Subject. Select Heading 2 or use source code <h2>Title</h2> using the Text Tab.
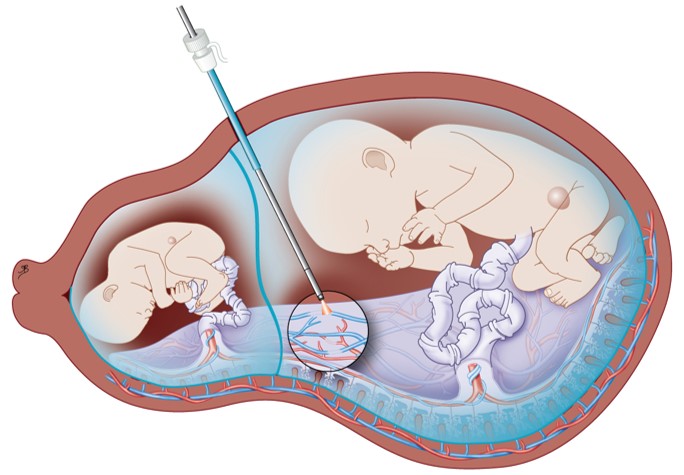
Example: Ultrasonic needle tracking for guiding fetal interventions
Body of report should be in Paragraph font.
You can either write a detailed review of your observations where specific progress has been made: A fiber optic hydrophone sensor was integrated into the cannula of a 20 Gaugeinsertion needle. The sensor which served as an ultrasonic tracker collected transmissions from the ultrasound imaging probe to form an image of the needle tip. Barker and Golay coded excitation were used to improve the sensitivity of the system. The performances of the tracking system in terms of sensitivity and accuracy under different excitation conditions are evaluated in a sheepin vivo in the contexts of brachial plexus nerve blocks and fetal interventions.
Or you can list your activities and work progress in list/bullet point format as follows:
- Initialised GIFT-Proto
- Currently based purely on NiftyView
- The aim is to have it building against a pre-build NifTK
- GIFT-Cloud extension of XNAT
- First development iteration complete, with a modified schema allowing for storing subject pseudonyms and query-retrieving them.
- Unit/integration tests for introduced components in the codebase
- System tests with Ruby for the relevant REST calls
- This version to be tagged GC-1.1.0
- Requested a virtual machine for GIFT-Cloud, as well as an initial project store of 2TB for storing the patient data
- GIFT-Cloud uploader application
- Started merging the relevant portions of the DicomCleaner and XNAT uploader applet codebases…..(ctd)
When writing your reports please bear in mind ‘What/Why/Conclusion’: what did you do, why did you do it, and what is the conclusion.
What: We realized several calibration experiments using a straight fetoscope (GRIN Lens) for simplicity purposes. We considered camera models commonly assumed in computer vision and more particularly the general model of central catadioptric camera (figure 1).
Why: We chose this latter one because it was originally designed for wide field of view optical system.
Conclusion: This experiments showed that a direct link could be established between dry and immerged calibration without estimating a new distortion function (by changing the focal length and projection enters). However, it is difficult to establish a proper mathematical link and it was necessary to use an underwater image to fully calibrate the system.
Inserting Images: If possible please include any images of figures in your post which support the observations of the month. Use Add Media to embed the images in your post and add captions where needed.