1 – Observations in OR
We continued the observations in the OR, with mostly TTTS procedures. I also attended a FETO and an MMC (Spina bifida, open procedure). The main outcome was a better understanding of the vatiability of patient / OR team positioning between operations. In some occasions, the team was setup in a particular layout and changed everything after a few minutes because of movements of the fetus.
Attendance of a cesarean cut procedure also gave infomation about body wall thickness in pregnant women.
2 – Meetings
Regular meetings with J. Deprest (when possible, every 2 weeks) together with Manu Vander Poorten in order to discuss establishment of specs for the different parts of the envisioned system.
I also attended a training session that was organized in Leuven by a surgical team from Twente. They used a realistic model from Surgical Touc (Toronto, Canada), which we also considered to buy. Attendance of the session allowed us to look at the model in details prior to acquisition.
PhD/Postdoc day on October 3rd in London
3 – OR tracking and recording
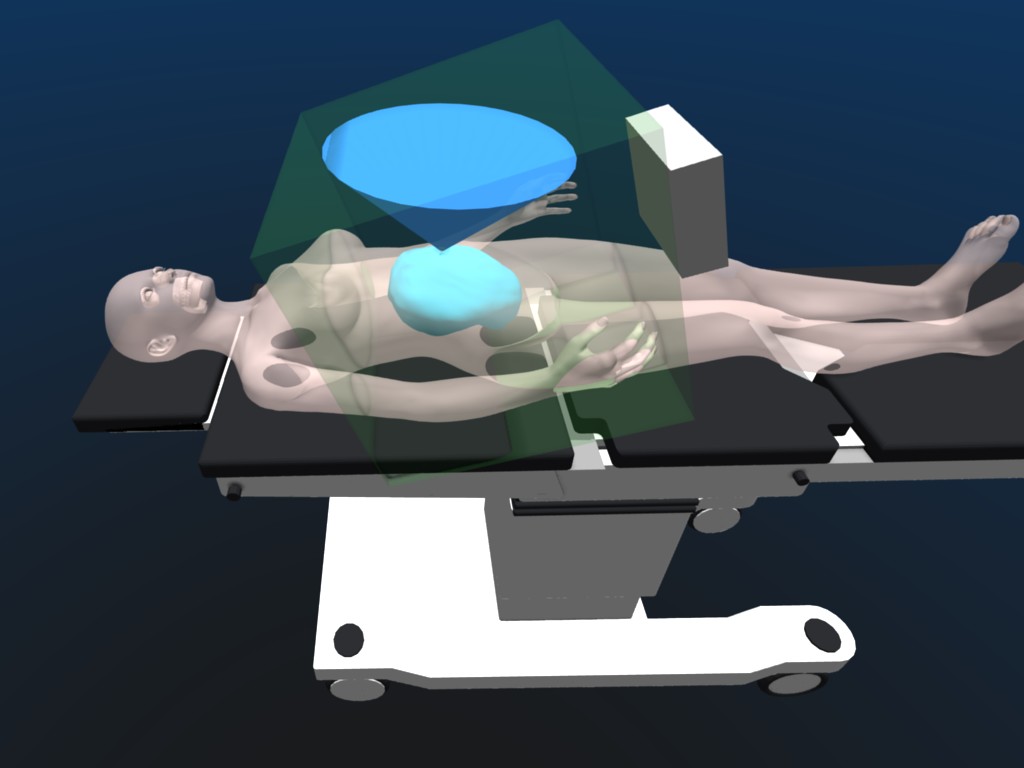
Investigation of fixation and positioning of the Aurora NDI interrogator in the OR, in order to check that the envisioned workspace of the tool is inside the trakcing range of the Aurora system.
Drafting of a solution to measure movements at the incision point. Tests in the lab are conclusive.
Work with the sterilization department of the hospital to plan sterilization tests of our connector (autoclave) and sensors (sterrad). Tests are conclusive, the parts are sterile and functional after the process.
Drafting of the data gathering protocol in order to include it in the patient consent form and ethical approval document.
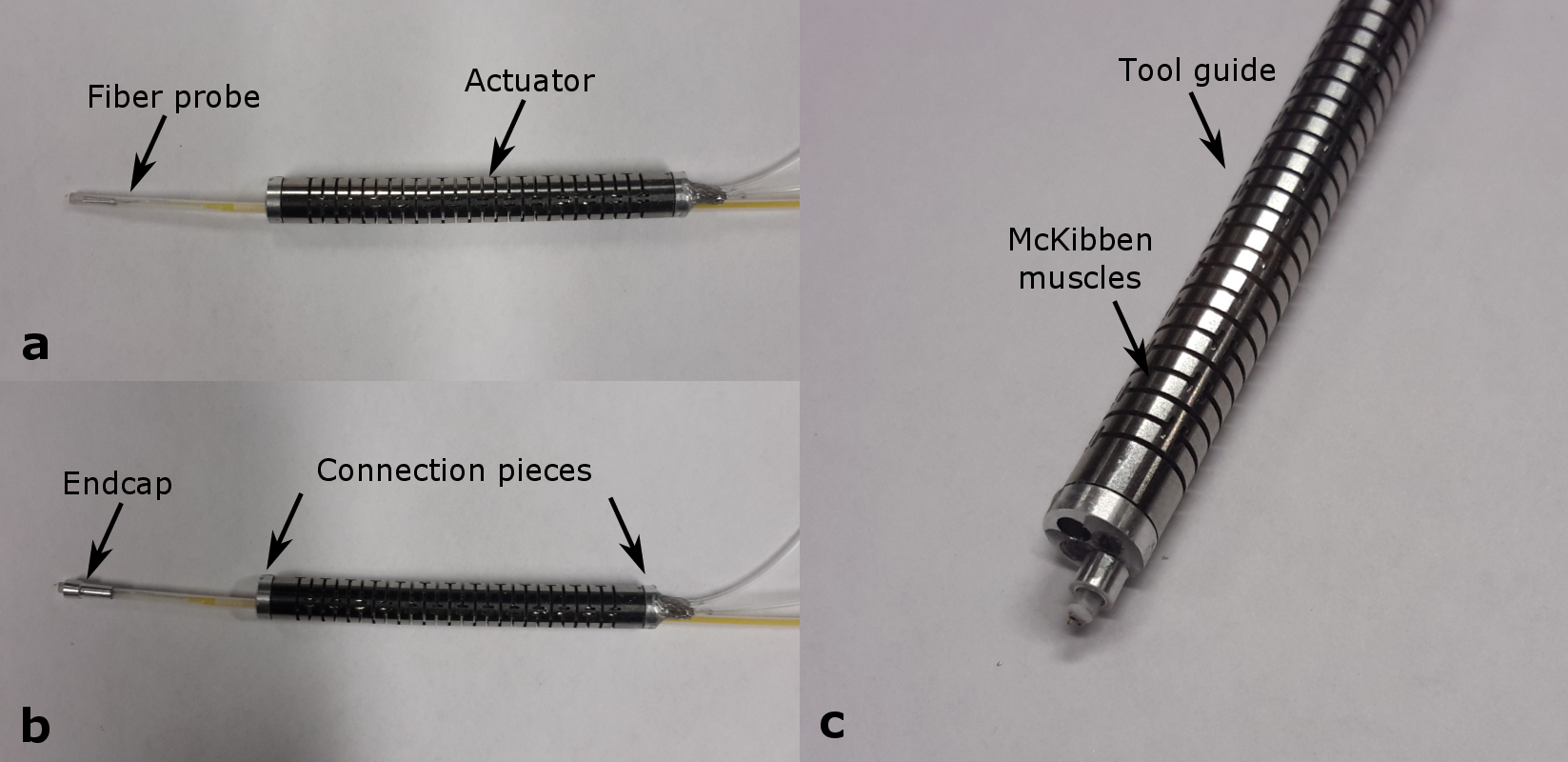
4 – Actuator for fetal imaging
A novel fluidic actuation system has been developed for in situ imaging of anatomic tissues. The actuator consists of a micromachined superelastic tool guide driven by a pair of pneumatic artificial muscles. Two additional working channels allow easy interchange of instrments or sensing equipment. This design is 7 mm in diameter, because of the choice of a modular system in which we can pass several actuators. Two working channels are present, and will be convenient to test different sensing principles.
Connecting pieces have been designed in order to fix a PA/US probe, designed at UCL, in the actuator. The goal was to be able to make ex vivo imaging experiments on phantoms and human placentas in december 2014 in London.