How will we achieve this?
Technological developments
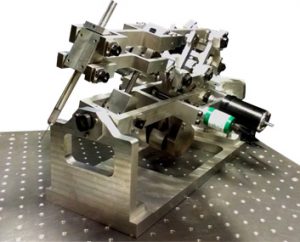
Dedicated actuators or “stabilisers” based on fluidic muscles will be developed and integrated. These actuators will help create smooth and dynamic movement yet occupy much smaller footprints than standard approaches. This key aspect of the flowing and stabilising nature of the actuation mechanism is important, not only because it will be advantageous for safety purposes, effectively limiting the risk and impact of collisions and subsequent tissue damage, it will also allow surgeons to adjust better with the variable living nature of the mother and unborn child, allowing surgeons to reduce trauma and the risk for premature birth, compared to purely manual interventions. Although we do not intend to make the actuated arm fully automated or robotic, by using image guidance, advanced control approaches will be explored that intelligently assist the surgeon during the procedure. The design will, for example, help lessen tremors in the surgeon’s hand and allow for bigger or more fine-grained manipulation by scaling down the surgeon’s gestures.
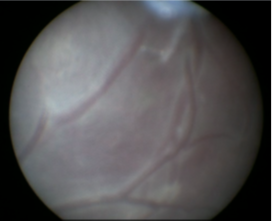
The 3D imaging probes will provide visualisation of tissue from inside the womb. Photoacoustic imaging probes will deliver harmless laser pulses to tissue. These light pulses will be absorbed by tissue and converted into ultrasound waves that will be received and processed to generate images. Optical ultrasound imaging probes will deliver light pulses to an absorbing nano-composite material to generate ultrasound. With both probe types, ultrasound waves will be received optically. Taken together, these 3D imaging probes will provide unprecedented functional and microstructural visualisations of the fetus and its environment.
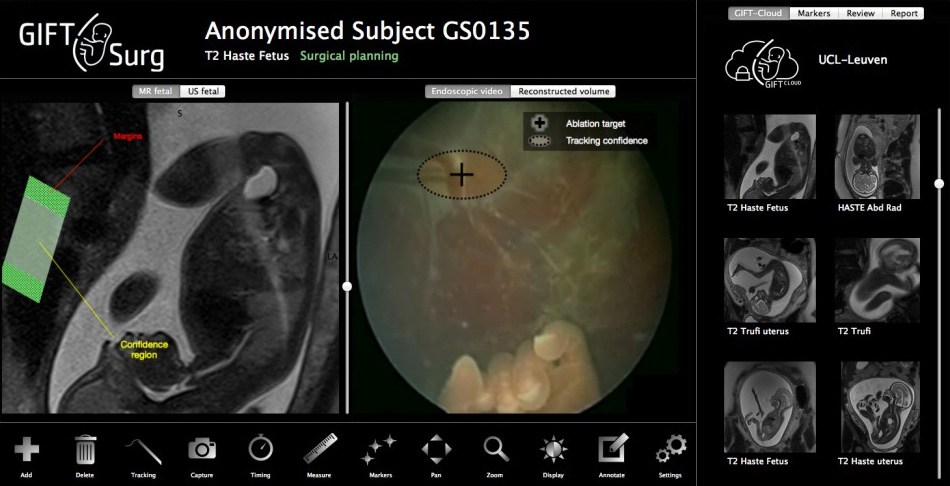
In addition to the advanced and flexible tools and the 3D imaging, surgeons will be able to use external 3D ultrasonography as well as MRI, when available, to construct a plan for the operation based on the specific anatomy and pathology of the fetus to be operated on. Computer modelling embedded with biomechanical information will be able to compute and predict deformations that may occur during surgery. Both the pre-operative data and the feedback from the “live” 3D imaging will be fed into the model and processed to give surgeons ongoing context, much like a GPS might tell us where we are on a predefined map. Ultrasonic tracking of needles and probes will be provided using integrated miniature fibre optic ultrasound receivers.
Workpackages
The project is broken into multiple work packages to help manage its delivery. The workpackages (WPs) are not in the order of which things are done but instead how similar tasks are grouped together. Items from each WP will be happening simultaneously with others. Although all WPs require experts from a number of different disciplinaries some WPs rely more heavily on specific skilled professionals.
Technological Workpackages:
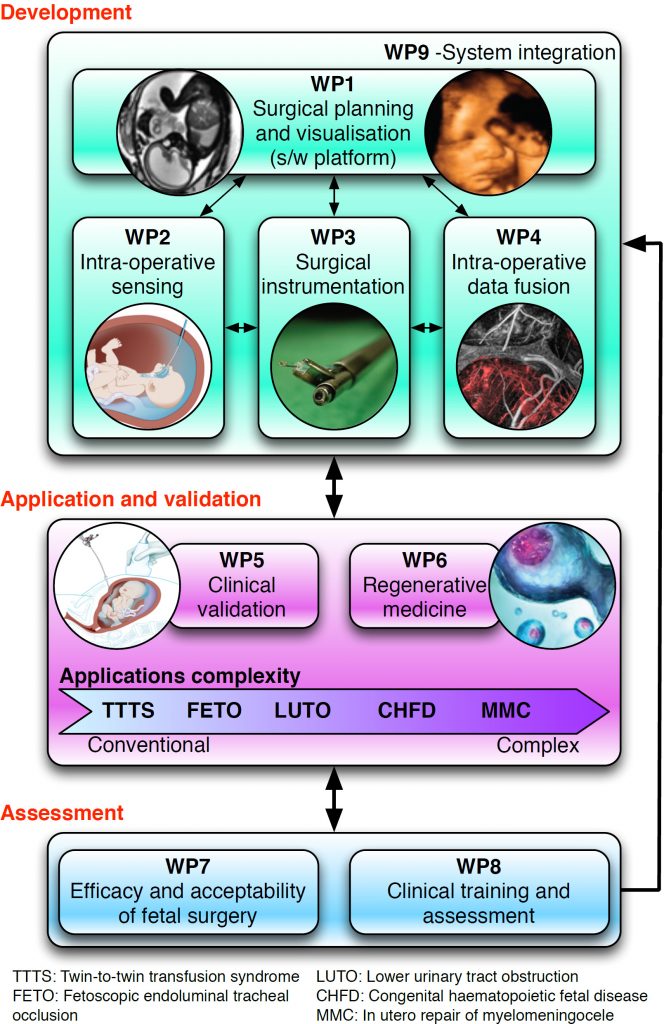
- WP1:
Surgical planning and visualisation. This WP is about the creation and development of the software that will run the hardware and imaging systems. It is reliant on software developers and medical imaging specialists. - WP2:
Intra-operative sensing – This WP involves the physical building of the camera and development of the photoacoustics system that will be used on the new tool to create 3D images. Most of this work will be carried out by Medical Physicists and Medical Engineers. - WP3:
Surgical instrumentation is about the creation of the new tool itself. The design incorporating the flexibility and small size needed, will be developed by experienced Medical Engineers. - WP4:
Intra-operative data fusion: is about linking the information provided from different channels in real-time during the procedure, for example by co-registering intra-operative ultrasound and pre-operative MR. - WP5:
Clinical validation. This package is about testing the technical achievements in a preclinical and eventually clinical environment. It relies heavily upon the skills of clinicians and surgeons. - WP9:
System Integration will take place throughout the complete project. This is about linking up all the various software and hardware components and robustly testing them
Clinical Workpackages:
- WP6:
Regenerative medicine: is about using the steps accomplished in WP1-5 and applying it to the breakthrough improvements in regenerative medicine. - WP7:
Efficacy and Acceptability of Fetal surgery. This WP is about the ethics and economics of fetal surgery. It relies on clinical consultants as well as medical economists, and the general public by way of patient groups. - WP8:
Clinical training and assessment is about training and ensuring medical professionals have the proficiency to use the new systems and equipment safely and flawlessly.